Feature based approaches for point cloud based geomonitoring
Areal deformation monitoring based on point clouds can be a very valuable alternative to the established point-based monitoring techniques, especially for deformation monitoring of natural scenes. However, despite the increasing use of point clouds to detect and quantify changes of natural structures, several challenges remain unresolved regarding the point cloud-based deformation analysis. In particular, these include the estimation of 3D displacement vector fields, parameterization of deformations, and quantification of error probabilities such as false alarm rate and probability of missed detection.
Several of these challenges are a result of the naive establishing of the point correspondences, which are in traditional methods (e.g., C2C and M3C2 [1]) defined by proximity in the Euclidean space. In this research project, we proposed to rather establish corresponding points based on the proximity in the feature space spanned by local feature descriptors. In particular we have developed and very successfully applied a learned descriptor, based on a convolutional neural network, rather than a hand-crafted one. The displacement vector field resulting from correspondence search in the feature space is noisy due to inherent limitations of the technology producing the point clouds, e.g. due to the sampling pattern of laser scanners, but also due to occlusions, motion, and limited descriptiveness of the feature descriptors.

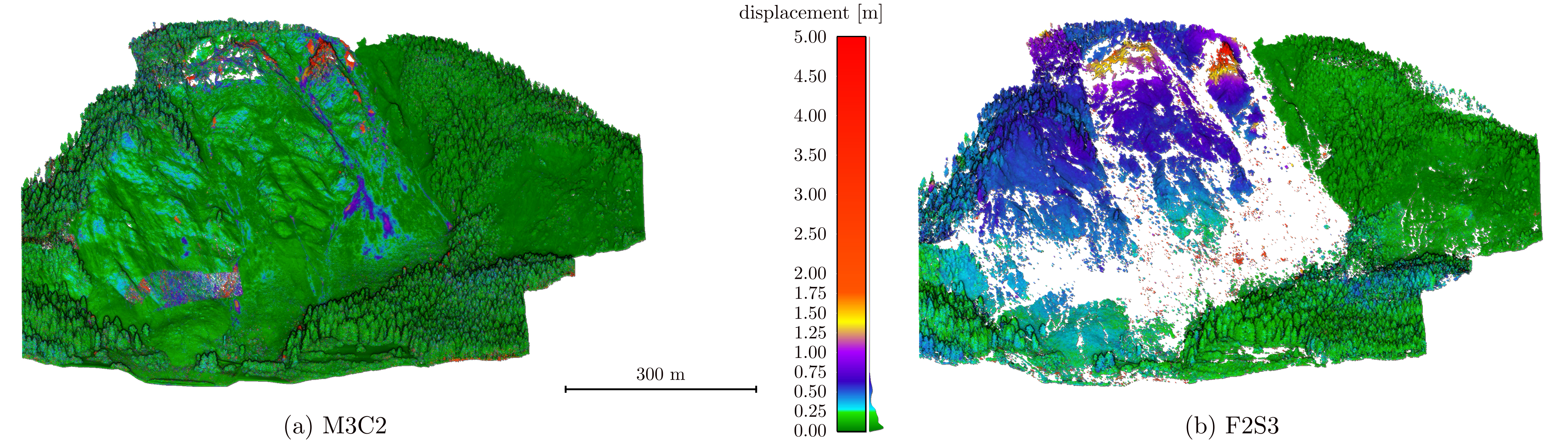
We therefore complement the correspondence search with a neural network that takes a set of putative corresponding points as input and performs a binary classification into inliers and outliers. The inliers and outliers denote the correct and false correspondences, respectively. This outlier detection step is based on the local context and can be understood as local smoothing that is spatially constrained to geometrically coherent local patches. We denoted this novel deformation analysis workflow for point cloud data (Figure 1) Feature to Feature Supervoxel-based Spatial Smoothing (F2S3) [2]. Figures 2 and 3 show the comparison of F2S3 with the traditional point cloud-based deformation analysis methods on UAV-based LiDAR point clouds obtained at a real landslide in the Swiss Alps. Figure 3 additionally shows reference displacements obtained from high precision total station data.

[1] Lague, D., Brodu, N., & Leroux, J. (2013). Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (NZ). ISPRS journal of photogrammetry and remote sensing, 82, 10-26.
Contact
Geosensorik und Ingenieurgeodäsie
Stefano-Franscini-Platz 5
8093
Zürich
Switzerland